
标定系列_六轴机器人工具手标定
2022-05-23
什么是工具坐标系?
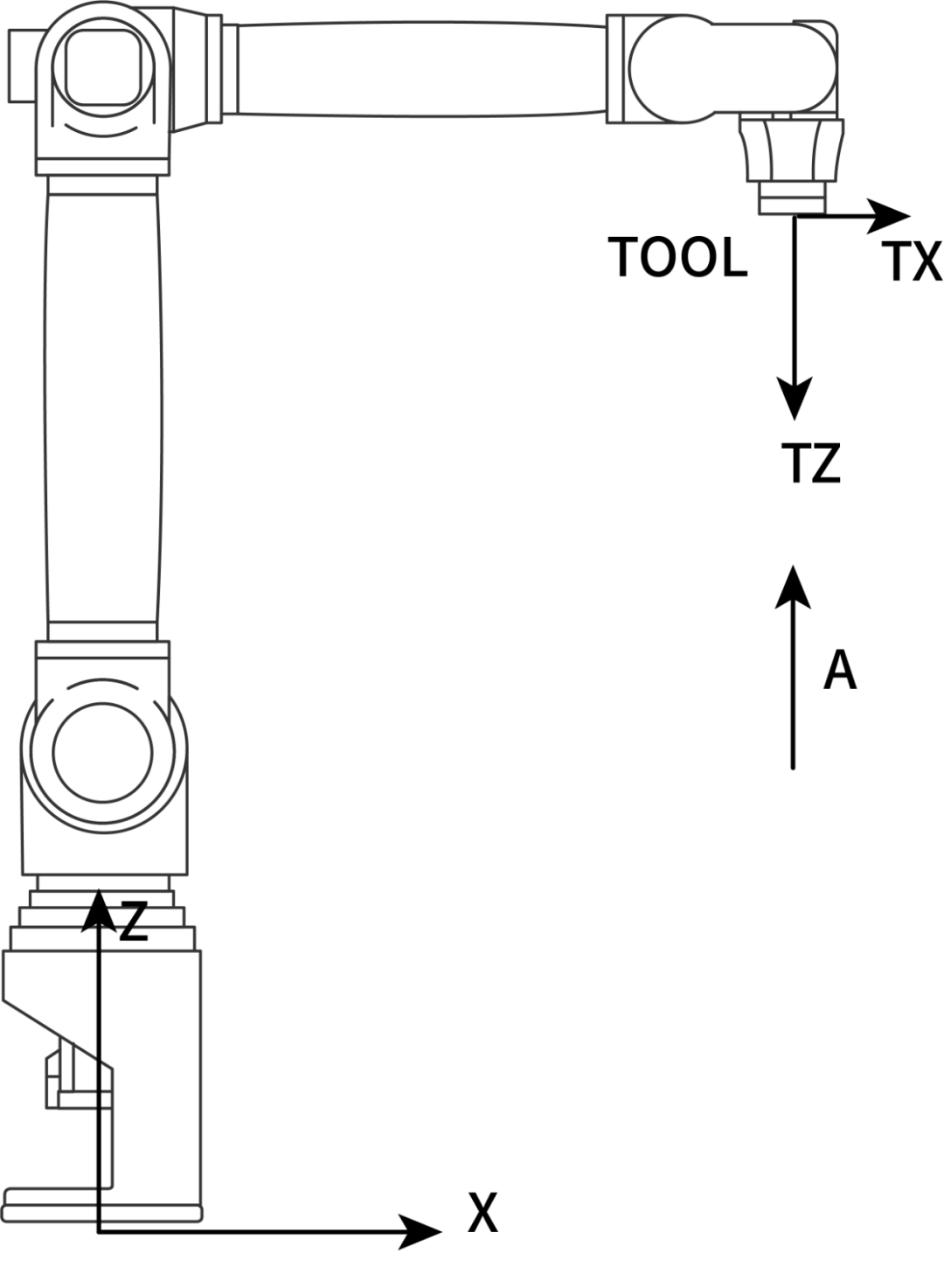
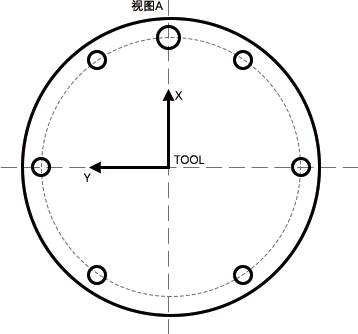
法兰盘中心:默认工具坐标系的原点,法兰盘中心指向法兰盘定位孔方向为+X 方向,垂直法兰向外为+Z 方向,最后根据右手法则即可判定 Y 方向。新的工具坐标系都是相对默认的工具坐标系变化得的。
TCP:TOOL CENTER POINT,即工具中心点
机器人轨迹及速度:指 TCP 点的轨迹和速度。
TCP 一般设置在手爪中心,焊丝端部,点焊静臂前端等等。
为了描述一个物体在空间的位置,需在物体上固定一个坐标系,然后确定该坐标系位姿(原点位置和三个坐标轴姿态),即需要 7 个 DOF 来完整描述该刚体的位姿[1]。对于工业机器人,需要在末端法兰盘安装工具(Tool)来进行作业。为了确定该工具(Tool)的位姿,在 Tool 上绑定一个工具坐标 TCS (Tool Coordinate System),TCS 的原点就是 TCP(Tool Center Point,工具中心点)。在机器人轨迹编程时,需要将 TCS 在其他坐标系的位姿记录到程序中执行。
工业机器人一般都事先定义了一个 TCP,TCP 的 XY 平面绑定在机器人第六轴的法兰盘平面上,TCP 的原点与法兰盘中心重合。显然 TCP 在法兰盘中心。ABB 机器人把 TCP 称为 tool0,REIS 机器人称之为 _tnull。虽然可以直接使用默认的 TCP,但是在实际使用时,比如焊接,用户通常把 TCP 点定义到焊丝的尖端(实际上是焊枪 tool 的坐标系在 tool0 坐标系的位姿),那么程序里记录的位置便是焊丝尖端的位置,记录的姿态便是焊枪围绕焊丝尖端转动的姿态。
思考
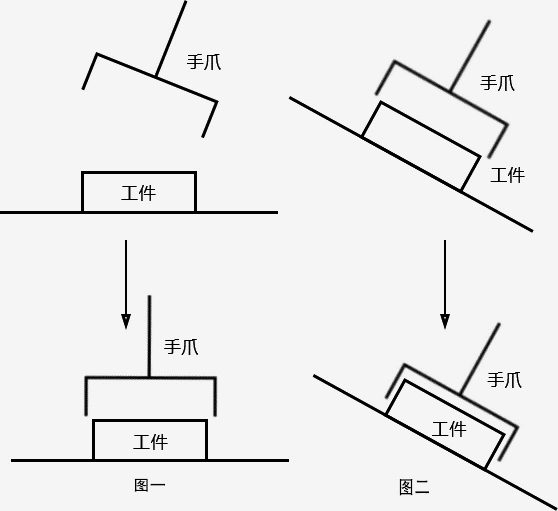
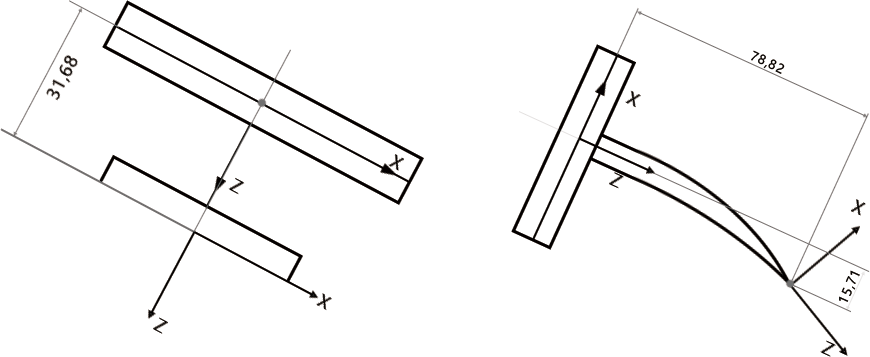
工具坐标系是运动中的一个研究对象,但是它在实际调试过程中,又起到了什么作用呢?思考下图一、图二的手爪姿态和位置是如何调整得到的?
推测:根据思考可以得出两个推测:
推测 1:若图 1 中的手爪有一个旋转点,使手爪直接绕着这个旋转点选择就可以。
推测 2:若图二中有一个手爪的前进方向就可以直接移动过去了。
结论:建立工具坐标系的作用:
1、确立工具的 TCP 点(即工具中心点),方便调整工具状态。
2、确定工具进给方向,方便工具位置调整。
工具坐标系特点
新的工具坐标系是相对于默认的工具坐标系变化得到的,新的工具坐标系的位置和方向始终同法兰盘保持绝对的位置和姿态关系,但在空间上是一直变化的
什么情况下需要使用工具手参数:需要用到绕 X、绕 Y、绕 Z 的姿态旋转时,需要进行工具手标定
什么情况下无需使用工具手参数:机器人本身仅做 Z 轴姿态旋转,且工具末梢位于机器人 6 轴法兰中心延长线上;此时可以不设置工具手参数。
什么是工具手标定?
工具手标定是使用工具手末梢对准在空间上一固定点,选取一定数量的点计算出工具尺寸及姿态;
使用工具手标定需满足以下条件:
- 机器人类型为:六轴串联多关节、六轴协作
- 工具末梢有可对准标定锥的特征:尖状的工具手
- 机器人本体参数准确

注:对于工具无尖端无法对准标定锥的情况,使用夹抓夹住特定尖状物体,也可以做标定,标定精度取决于尖状物体如何放置
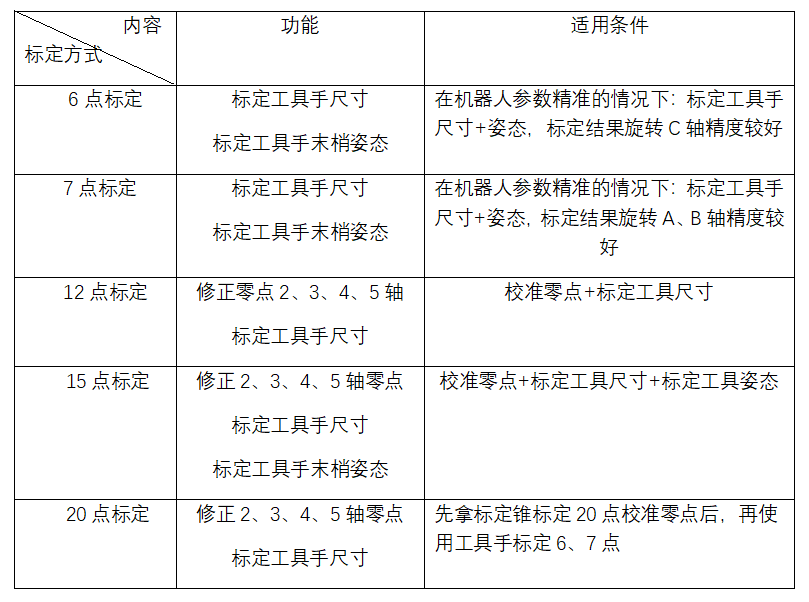
如何选择标定方式
标定方法特点如下:
情景 1 机器人已做过激光标定+使用焊枪
推荐:使用 6 点标定工具手即可,标定完成验证机器人标定结果即可。
情景 2 机器人未做过激光标定+使用焊枪
推荐:使用 12 点标定工具手即可,标定完成验证机器人标定结果即可。
情景 3 标定码垛夹抓
推荐:优先选择直接填工具尺寸,不知道尺寸的再使用 6 点标定
- 准备一尖状物体且可以被夹抓抓住,该物体尽可能放置到夹抓中
- 使用 6 点标定工具手即
- 标定完成验证机器人标定结果即可。
情景 4 机器人零点丢失,按照对位孔标定的零点位置有偏差
推荐:
- 准备标定工具,该工具末梢尽可能位于 6 轴法兰中心延长线上、工具尺寸较小
- 使用 20 点标定,校准零点
- 20 标定后再换上要实际用到的工具手进行 6 点标定
- 标定完成验证机器人标定结果即可。
情景 5 6 点标定后 A、B 轴旋转误差较大满足不了使用需求
推荐:更换 7 点标定