
纳博特二次开发现已支持 ROS 生态!
2022-10-28
纳博特二次开发现已支持 ROS 生态!
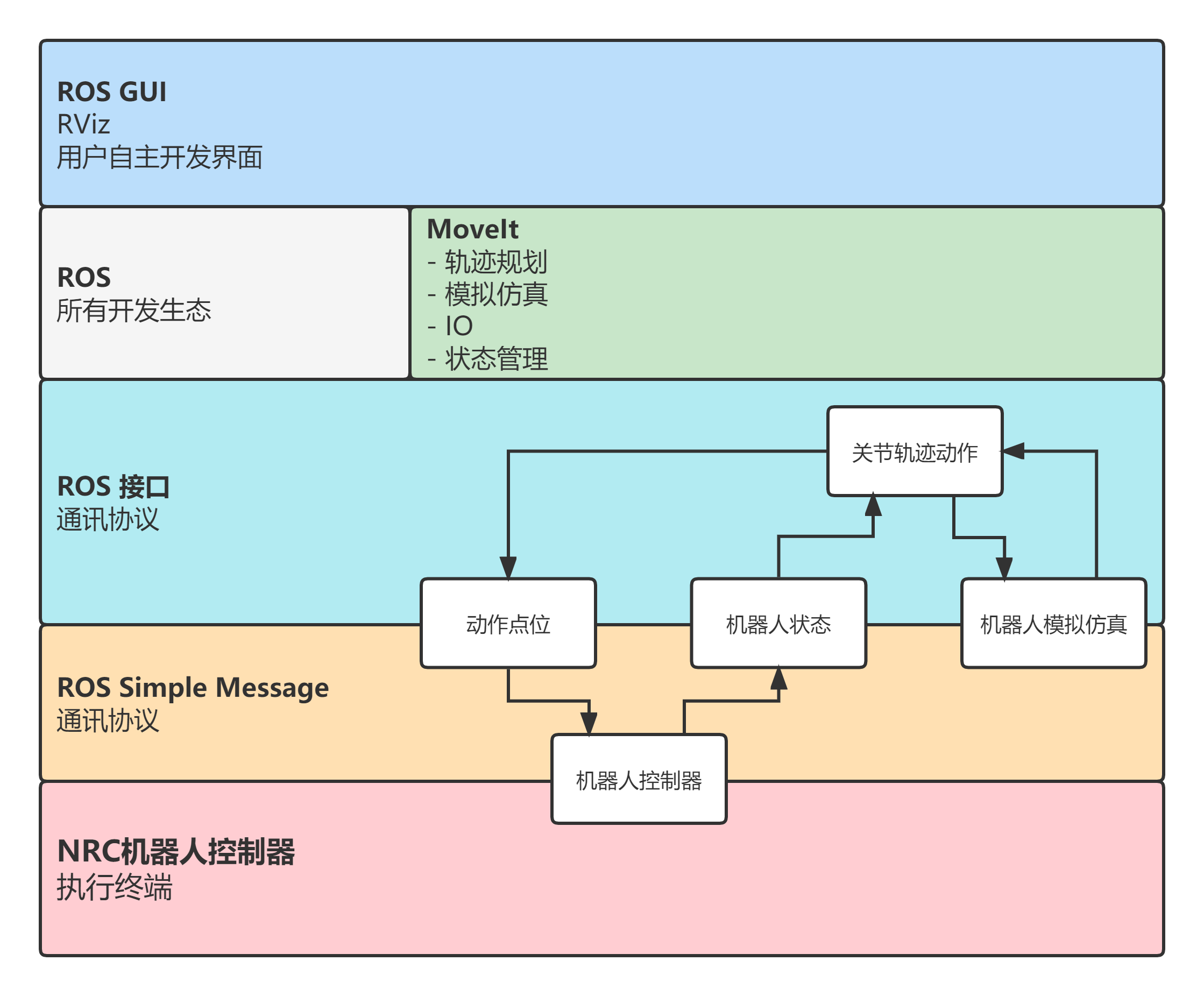
纳博特 ROS 功能包支持 MoveIt 轨迹规划和 RViz 可视化工具和 Gazebo 虚拟仿真平台。已完整实现 MoveIt 标准协议 Simple Message,全面融入 ROS 生态。
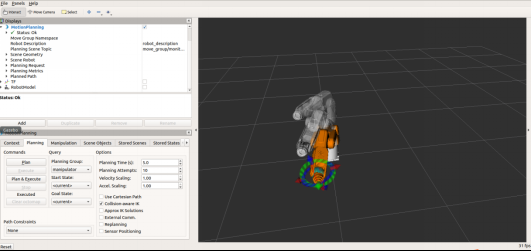
预览
使用 RViz,可以在脱离实体机器人的情况下利用虚拟机器人通过 MoveIt 进行轨迹规划并实时查看仿真动作。当然也可将 NRC 协作机器人控制器同时连接到 RViz 和实体机器人,利用 RViz 远程操控机器人运行,并在软件中查看机器人实时轨迹动作,并将机器人轨迹点位、电机扭矩、电流等数据实时上传到云端,实现云端的数字孪生。
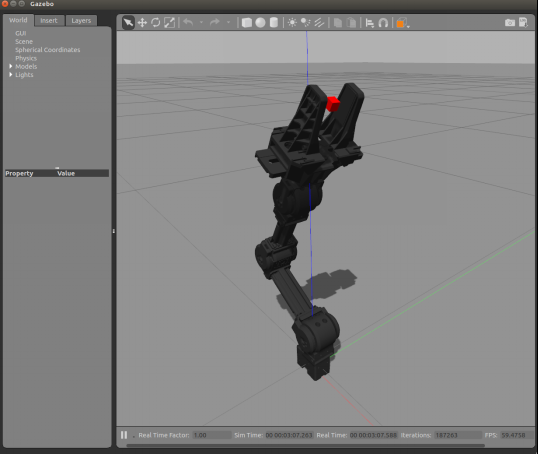
预览
通过 Gazebo,我们可以在其中将整个产线建模,并搭配 RViz 进行视觉、传感器模拟仿真,利用 MoveIt 进行轨迹、IO 的规划。当仿真确定可以达到目标后便可以将 MoveIt 连接到 NRC 控制器,将运动数据下发,无需人工示教。
预览
如果本文有错误请向我们反馈,我们很珍惜您的意见或建议。