
22.07版本发布了!
2023-03-14
经过长时间紧张的开发与测试,纳博特控制系统 22.07 版本发布了!
那么本次发布的亮点有哪些呢?小纳带你详细了解一下!
重大功能更新
焊接工艺改版
本次焊接工艺进行了重大改版,增加了诸多新功能。
- 增加点焊功能
- 摆焊-摆动方式增加圆形摆
- 增加摆焊参考点指令
- 增加定点摆焊
- 增加多重多道焊功能
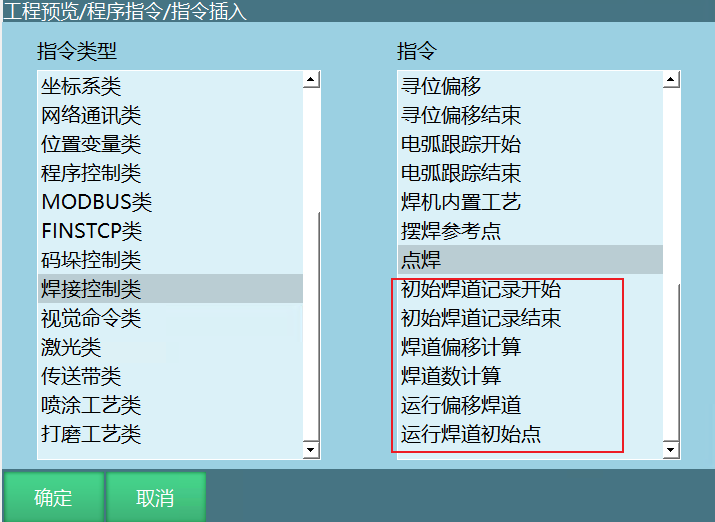
预览
- 增加焊接电流电压微调整功能

预览
- 优化再启动功能
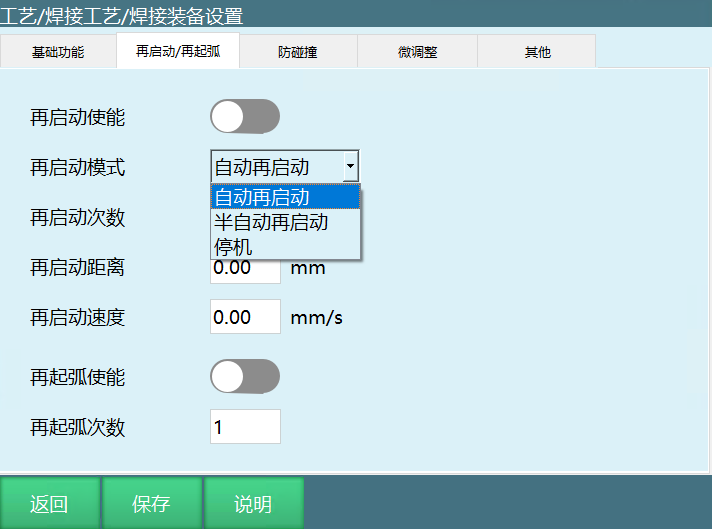
预览
- 增加再起弧功能
- 优化模拟量电流电压匹配
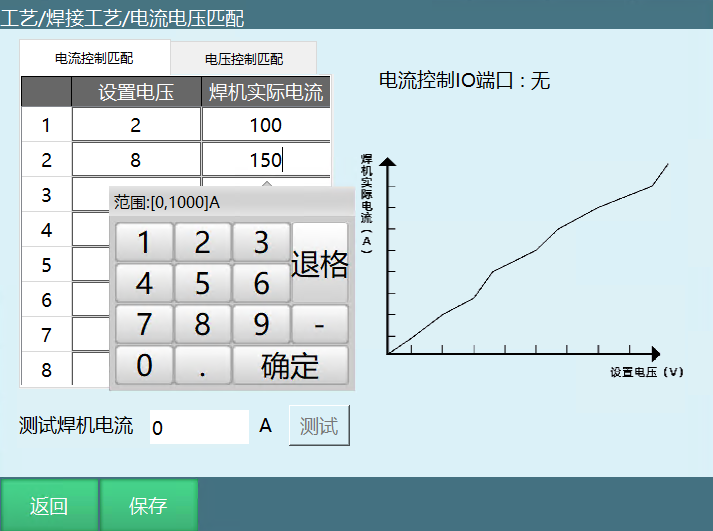
预览
- 增加渐变功能
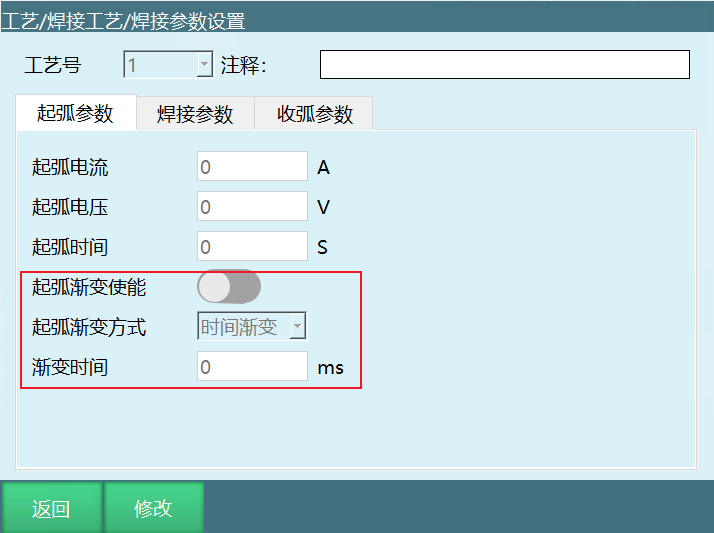
预览
- 焊枪防碰撞后拖拽功能,碰撞后可拖拽示教 4、5、6 轴
- 增加摆焊轨迹自动修正功能
门型指令
增加门型指令,测试数据如下
测试环境:
四轴 SCARA 机器人
| 参数 | 数据 |
|---|---|
| 关节转速 | 5000 |
| 指令速度 | 5000 |
| 平滑 | 5 |
| 全局速度 | 100% |
| 加速度 | 15 |
| 减速度 | 15 |
| 最小加速度时间 | 0.02 |
测试结果: 关节转速为 5000 转时,节拍为 0.3s 关节转速为 6000 转时,节拍为<0.3s
支持 Lua
您可以通过 Lua 编写更加复杂的运行逻辑了!
作业程序中增加 Lua 文件调用指令
- 支持 lua5.2
- 支持由 lua 语言编写的扩展程序
- 支持操作变量、IO、工具手参数、用户坐标参数、报错、打印日志等功能
也可以在作业程序中单独执行 Lua 语句。
当前行运行功能
可以任选一行指令,并从当前行开始运行指令,大幅增加调试效率。
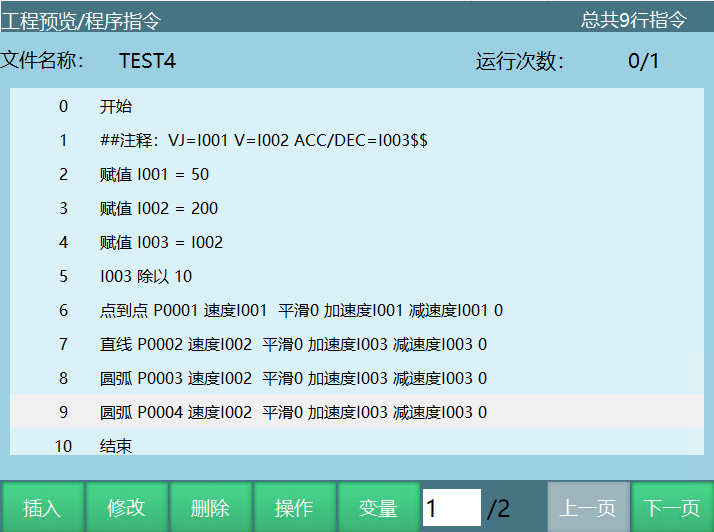
指令参数绑定变量
现在指令中的参数均可绑定变量,可以大幅降低编程工作量,并且可以写出更复杂的逻辑!
预览
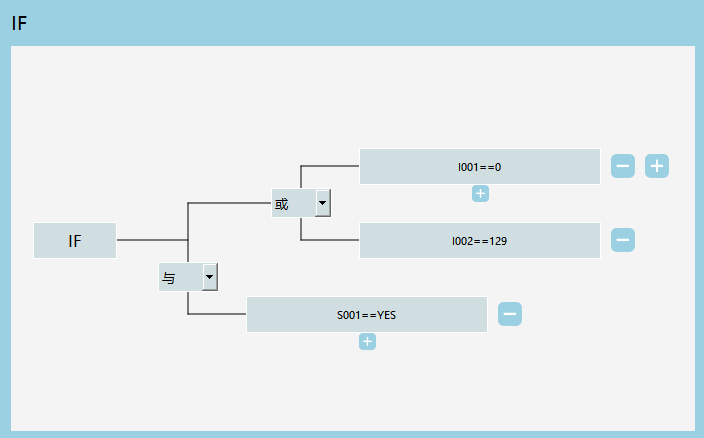
多条件判断
条件判断指令(IF)现在支持多个条件判断,并且提供了操作友好的界面,您可以轻松编写复杂条件的判断指令。
以下示例为 IF((I0010||I002129)&&S001=="YES")的判断指令
预览
新的报错机制
重新设计的报错机制让错误警告更加醒目,也让整个操作过程更加安全,需要清除全部错误后才可上电运行程序。
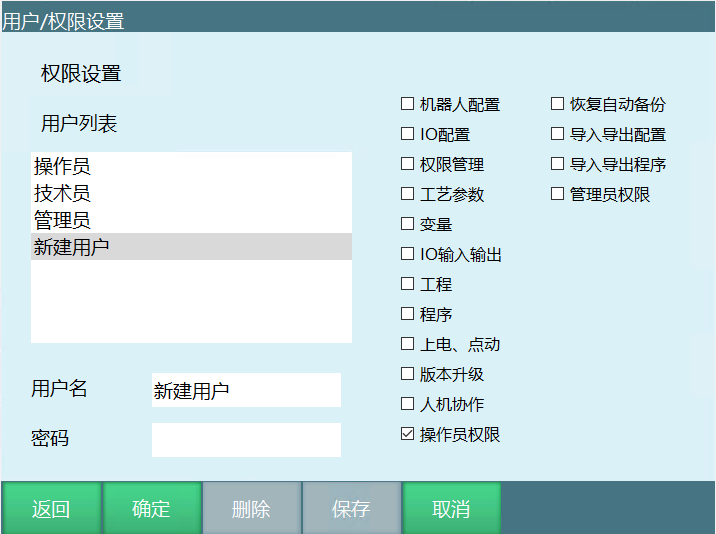
用户权限自定义
支持添加用户、可自由配置权限
预览
modbus 主站功能
增加 modbus 主站功能
支持 4x、3x、4x-bit、3x-bit、0x、1x 等类型地址读写
任何模式下,modbus 都可读取全局数值
modbus 多主站连接,modbus 从站最多允许 9 台主站同时连接
modbus 增加 100 个 GP 变量
协作机器人外部按钮
人机协作增加外部按钮功能
可通过协作机器人末端的按键控制以下功能:
- 录制拖拽轨迹
- 拖拽轨迹回放
- 切换拖拽模式
- 上下使能
- 夹爪开关
- 保存轨迹
字符串类型
- 增加字符串变量类 变量界面、监控界面增加字符串变量的修改与查看入口 字符串变量前缀为 S
- 增加字符串追加指令 支持字符串+运算
- 增加字符串索引截取指令 可通过指定索引截取所需的部分字符
- 增加字符串分隔符拆分指令 可通过指定字符将字符串截取为多段
- 增加字符串定位查询指令 查询指定字符在字符串中出现下的所有位置
- 增加字符串长度指令 获取指定字符串变量的字符长度
- 增加字符串转非字符串指令 可将字符串类型变量转换为整型、浮点型、布尔型变量
- 增加非字符串转字符串 可将整型、浮点型、布尔型变量转换为字符串类型变量
- 增加多条指令参数支持字符串类型,如输出信息、modbus 读写、网络通讯等
试运行功能
增加试运行功能,示教模式下可连续运行指令。
小改动
程序编辑
优化操作弹出按钮,高强度编程下,缩减操作步骤,提高效率
批量操作支持修改工艺号

预览
传送带跟踪
- 增加等待点 无工件时可到指定点等待
- 增加获取传送带跟踪位置指令 获取本次跟踪的目标点存到位置变量
- 增加删除传送带跟踪目标指令 可删除本次或队列中所有跟踪目标
- 增加参数“追踪目标高度”
- 增加参数“传送带位置模式”,
- 增加恒速模式 传送带速度可从编码器获取也可直接填传送带速度
- 参数“传送带速度”、“传送带标定值”等开放可修改
干涉区机器人范围合并
- 改为 2 点标定干涉空间
- 可状态输出、可停止
IO 设置
- 界面 UI 调整
- 报错提示”功能增加对错误类型的支持
- IO 显示自定义名称
视觉
- 视觉增加清除标定的抓取姿态功能
- 传送带视觉跟踪整条轨迹
- 视觉新增相机标定
如果本文有错误请向我们反馈,我们很珍惜您的意见或建议。