
物流系统自动供包
系统方案简介
方案概述
通过 3D 机器视觉系统检测无序堆放包裹的位置和姿态,发送位置信号给机械手,引导机械手对包裹实施抓取,高效替代人工重复作业,减少包裹损耗。

预览
复杂的供包环境
- 定位:给出做优抓取策略,定位抓取位置
- 分类:区分软包带及纸箱,防止甩包
- 异常处理:超大、超重、包裹变形、或者卡住处理

预览
杂乱包裹精准定位

预览
杂乱包裹精准定位
视觉系统组成
- FM851-E2 的工业 3D 相机 1 台
- 外置 LED 光源
- 软件 SDK(工控机)
- Package Picking 软件包
完整方案配置
相机:
- 相机硬件:图漾 FM851-E2
视觉软件:Package Picking 机器人:
机器人控制系统:纳博特控制系统
工控机:
- 系统:Windows 10 企业版 64 位
- 处理器:Intel(R) Core(TM) i7-10700F CPU @ 2.90Ghz
- 内存:16G
- GPU:NVIDIA GeForce GTX 1660 SUPER
其他:
- 光源、吸盘、棋盘格、气泵等
综合系统性能
实验条件:1680 件/小时
节拍:2.08 s/件
实际运行:> 1500 件/小时
采图及计算过程与机械手运动并行,机械手全流程零等待!

预览
方案示例
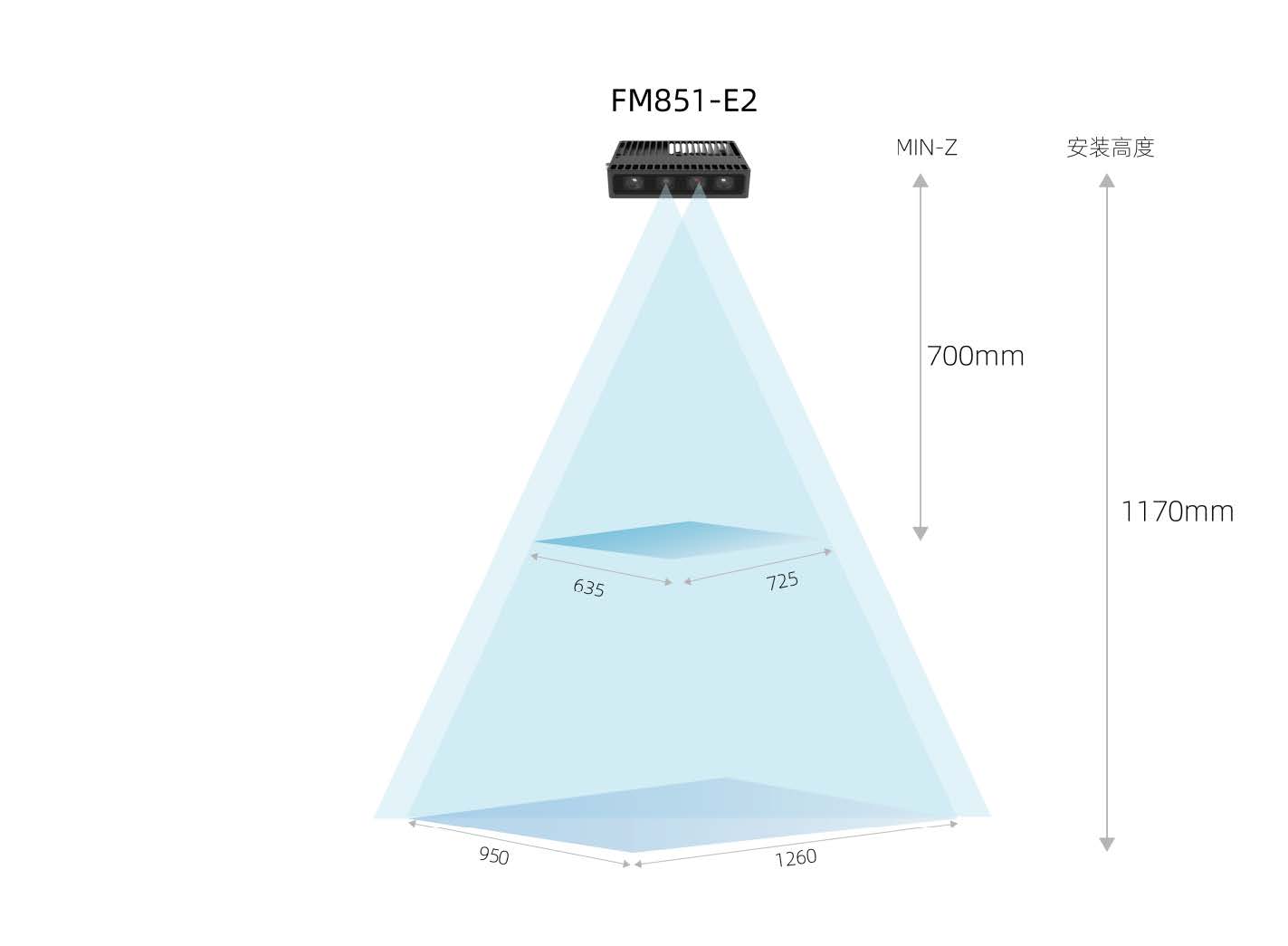
视觉系统安装说明
相机安装高度:
1170 mm(距离供包台表面)
覆盖视野:
- 725*635 @ 700 mm
- 1260 * 950 @1170 mm
预览
安装高度
视觉系统性能
基于图漾主动双目结构光 3D 相机 FM851-E2,具备高帧率、大视野的特点,为客户提供极致性价比的工业级 3D 视觉系统。
| 图漾 | FM851-E2 |
|---|---|
| 3D 相机尺寸 | 124mm X 28.6mm X 86.8mm |
| 测距范围 | 0.7 m-6 m |
| 3D 测量精度 | 1 mm-6 mm |
| 深度图分辨率 | 1280p |
| RGB 分辨率 | 1280p |
| 帧率 | 16-26 fps |
| 基线配置选择 | 55 mm |
| 工作范围 | 715 x 600 @ 700 mm 6650 x 5340 @ 6000 mm |
| 接口 | 千兆以太网(RJ45) |
案例

预览
上位机监控




如果本文有错误请向我们反馈,我们很珍惜您的意见或建议。