进入设置-工具手标定-7 点标定界面,标定方式可以选择 6 点标定。
标定方法如下。
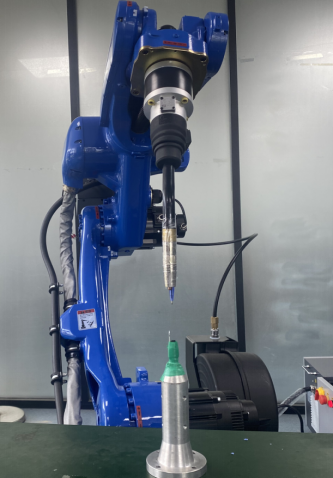
点 1
机器人 5 轴垂直向下

点 2
机器人在第一点的基础上 C 轴旋转 180°

点 3
机器人 B 轴角度在 35°

点 4
机器人回到零点,然后工具手末梢垂直

点 5
机器人在第四点的基础上动 X-
点 6
机器人在第五点的基础上动 Y+

注意
- 6 点标定结束选中标定的任意一点,点击 【运行至该点】,可以查看标定是否准确;
- 点击【计算】按钮,标定成功。点击底部的【返回】按钮返回“工具手标定”界面,绕 ABC 旋转可以检查标定的点是否正确
- 若在标定过程中对标定的某一点不满意,可以点击该行所对应的【取消标定】按钮,取消标定后再次标定该点。
- 点击底部的【返回】按钮返回“工具手标定”界面。