该标定方式验证的是工具手绕 A,B 轴的精度准
点击底部的【七点标定】按钮进入七点标定界面,如图
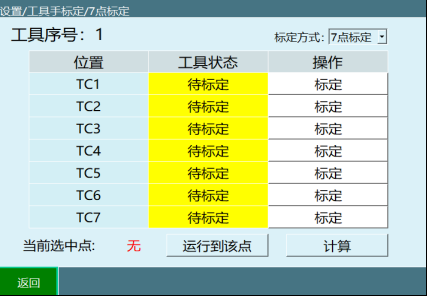
若没有工具的详细参数,可以进行 TCP 标定,自动计算出工具各项尺寸参数。具体标定步骤如下:
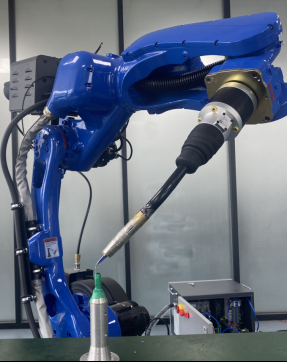
点 1
将工具末端垂直且正对参考点

点 2
将机器人切换一个姿势,末端正对参考点

点 3
将机器人切换一个姿势,末端正对参考点

点 4
将机器人切换一个姿势,末端正对参考点
点 5
将工具末端垂直且正对参考点(同点 1)

点 6
在点 5 的基础上,沿笛卡尔坐标系 X 轴负方向移动任意距离

点 7
在点 6 的基础上,沿笛卡尔坐标系 Y 轴正方向移动任意距离