摘要:EPR6-S 是武汉迈信电气技术有限公司在上一代 EPR6 基础推出的新一代工业机器人伺服驱动器。其全新的六轴单指令控制模式、六轴单 EtherCAT 站点模式(单站点多轴模式)大大提升了系统的稳定性,并且在轴同步性上也做到了业内顶级水平。

一、什么是单站点多轴
单站点多轴指的是一个 EtherCAT 站点对六个轴同步收发通讯指令。
传统伺服驱动器在工业机器人系统中使用一台伺服驱动一台电机,每个驱动器对应一个 EtherCAT 站点。该模式接线繁琐,稳定性低且轴同步性能得不到提升。拼接型的多合一驱动器在 EtherCAT 通讯模式上也是串行构架,在驱动器内部将六个子驱动板用网线相连接,除通讯板或主控板外每个子板为一个 EtherCAT 站点。

▲ 国产机器人伺服驱动器的发展
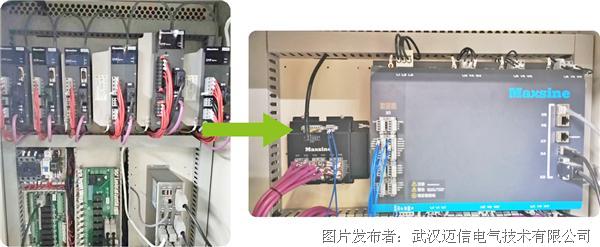
二、单站点多轴设备的优点
传统的控制柜对比装配 EPR6-S 伺服控制柜,仅装配一台伺服驱动器,接线简单,整个系统具有唯一的一对 EtherCAT 站点。
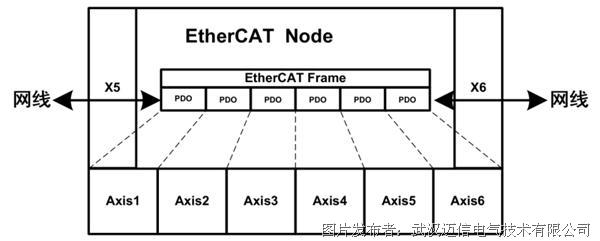
三、EPR6-S 如何做到单站点多轴

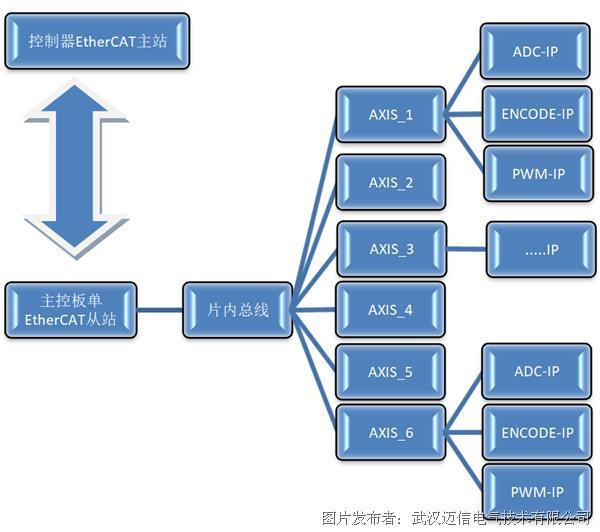
单站点多轴 PDO 数据分配
EPR6-S 适配的控制器厂家 EPR6-S 适配的控制器厂家
四、EPR6-S 的 XML 文件分享
点击下方“阅读原文”下载 Maxsine_EPR6-S_XML 文件(仅支持微信 PC 客户端),或登录迈信官网下载中心下载此文件(网址:http://www.maxsine.com/download/technology)。根据XML匹配对应数据帧的通讯。
五、机器人控制器升级单站点多轴方案指南
纳博特等主流控制器厂家已提供针对 EPR6-S 的单站点多轴方案专用升级包,请客户咨询销售或前往迈信官网下载中心下载。
与纳博特机器人控制器适配
纳博特机器人控制器示教器软件升级
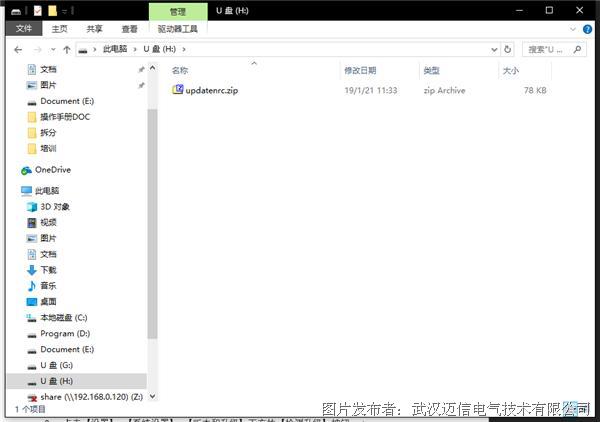
- 将升级文件(.zip 格式,不需解压缩,且文件名内不可以有括号等特殊字符)放入 U 盘的根目录下,(U 盘必须为 FAT32 格式)将 U 盘插入示教器的 USB 接口。
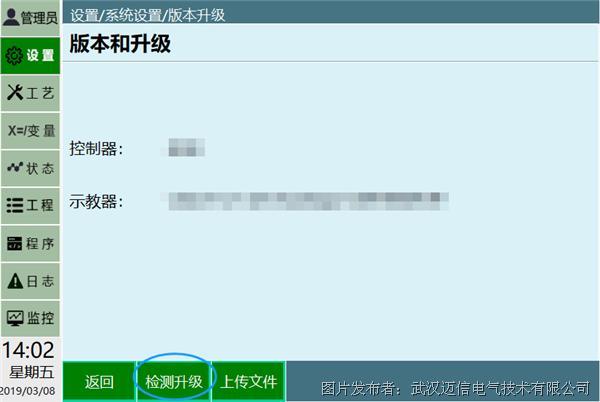
- 点击【设置】-【系统设置】-【版本和升级】下方的【检测升级】按钮。
- 在列表中选择自动检测出的升级文件。
- 点击【确定】按钮。
- 升级成功后示教器会自动重新启动,待重启后升级成功。
上传文件
下载最新的 EPR6 纳博特固件程序,若要上传 ENI 文件等文件到控制器中,请遵循以下步骤:
- 准备一台电脑、一个 U 盘;
- 在 U 盘中新建一个文件夹,名为 upgrade;
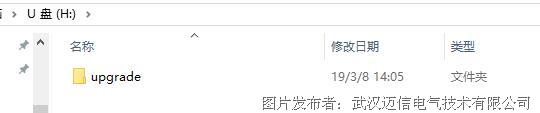
- 将要上传的文件放入 upgrade 文件夹内;

- 将 U 盘插入示教器的 USB 接口;
- 打开设置-系统设置-版本升级界面;
- 点击上传文件按钮;
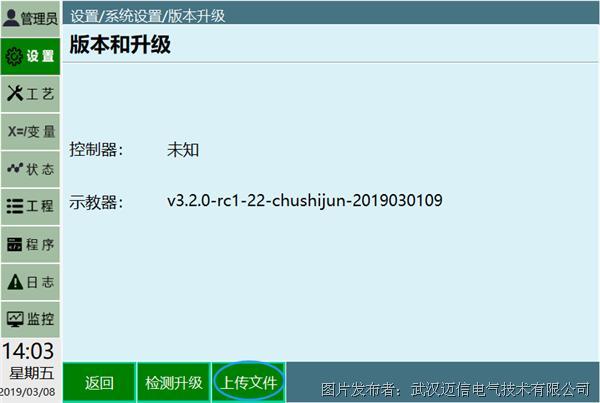
7.在弹出的已检测到的文件中选择要上传的文件,并点击确定按钮。

来源:工控网