The calibration method verifies the precision of the tool hand when rotating around the A and B axes
Click the "7-point calibration" button at the bottom to enter the 7-point calibration interface, as shown in the figure:
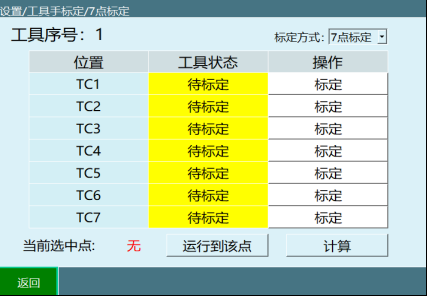
If the detailed parameters of the tool are not available, TCP calibration can be performed to automatically calculate the various dimensional parameters of the tool. The specific calibration steps are as follows:
P1
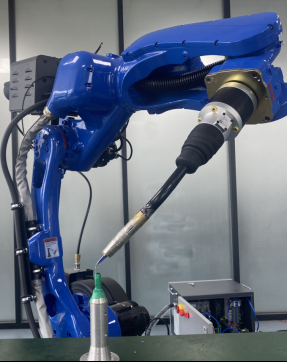
Align the tool end vertically and facing the reference point

P2
Switch the robot to a posture with the tool end facing the reference point

P3
Switch the robot to a posture with the tool end facing the reference point

P4
Switch the robot to a posture with the tool end facing the reference point
P5
Align the tool end vertically and facing the reference point (same as P1)

P6
On the basis of point 5, move any distance in the negative direction of the Cartesian coordinate system X-axis

P7
On the basis of point 6, move any distance in the positive direction of the Cartesian coordinate system Y-axis