Video
We have created a video tutorial on how to connect the NexDroid system to ROS.
NexDroid and ROS Integration - Connection and Usage
Ⅰ. ROS Environment Initialization
·Installation of ROS
This section includes the complete installation steps and solutions to common errors.
1. Set up sources.list
Set up your computer to install software from packages.ros.org.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'If the download speed is slow, you can configure the Tsinghua mirror as follows:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'PS: If the download fails, you can try configuring the Alibaba mirror or Tsinghua mirror for Ubuntu. Below is a configuration scheme for the Alibaba mirror.
Backup the source list
The default sources configured for
Ubuntuare not from domestic servers, resulting in slow download and update speeds. First, you need to back up the source list filesources.listsudo cp /etc/apt/sources.list /etc/apt/sources.list_backupOpen the
sources.listfile for editingsudo gedit /etc/apt/sources.list
Edit the /etc/apt/sources.list file and add the Aliyun mirror source at the beginning of the file:
deb http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverseRefresh the list
sudo apt-get update sudo apt-get upgrade sudo apt-get install build-essential
2. Set up the key
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C6543. Install
sudo apt update
sudo apt install ros-melodic-desktop-full4. Initialize rosdep
If initialization fails, follow step 6 for modification. Complete the initialization and then proceed to configure the environment variables.
sudo rosdep init
rosdep update5. Set up environment variables
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc6. rosdeq error
Due to server issues, you may encounter the following problem and need to modify the configuration file before continuing
sudo rosdep init
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.rosdep update
reading in sources list data from /etc/ros/rosdep/sources.list.d
ERROR: error loading sources list:
('The read operation timed out')- Open the file containing the resource download function:
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/sources_list.pyAdd
url="https://ghproxy.com/"+url
Modify the
DEFAULT_INDEX_URLin the/usr/lib/python2.7/dist-packages/rosdistro/__init__.pyfilesudo gedit /usr/lib/python2.7/dist-packages/rosdistro/__init__.pyDEFAULT_INDEX_URL = 'https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml'
Modify the addresses in the remaining (4) files, and add
https://ghproxy.com/before the addresshttps://raw.githubusercontent.com/$ sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py //Modify line 36 $ sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py //Modify line 72 $ sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/rep3.py //Modify line 39 $ sudo gedit /usr/lib/python2.7/dist-packages/rosdistro/manifest_provider/github.py //Modify lines 68 and 119Resolve Hit's fifth address error
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py //Add the following code at line 204 (the first line of the function block) gbpdistro_url = "https://ghproxy.com/" + gbpdistro_url //Note: The double quotation marks in the proxy address of the original URL are in Chinese. Directly copying and pasting may result in character recognition errorsIf the error persists, try modifying the
sudo gedit /etc/resolv.confComment out the existing nameserver line and add the following two lines:
nameserver 8.8.8.8 #google domain name server nameserver 8.8.4.4 #google domain name serverSave and exit. Execute
sudo apt-get update
Then execute
sudo rosdep init
ERROR: default sources list file already exists:
/etc/ros/rosdep/sources.list.d/20-default.list
Please delete if you wish to re-initializeSolution:
Execute the following command to delete the existing initialization file:
sudo rm /etc/ros/rosdep/sources.list.d/20-default.listRun the following command again
sudo rosdep init·Installation of ROS function package
sudo apt-get install ros-melodic-moveit
sudo apt-get install ros-melodic-joint-state-publisher
sudo apt-get install ros-melodic-robot-state-publisher
sudo apt install ros-melodic-gazebo-ros-pkgs
sudo apt-get install ros-melodic-gazebo-ros-control
sudo apt-get install ros-melodic-joint-trajectory-controller·Creation of ROS workspace
mkdir -p ~/inexbot/src
cd ~/inexbot/src
catkin_init_workspace
cd ../
catkin_makeModify the ~/.bashrc file:
gedit ~/.bashrcAdd the following line at the end of the file:
source ~/inexbot/devel/setup.bashCopy all the inexbot function packages to the inexbot/src directory
II. Configuring Moveit and the Robot
Before establishing the connection, it is necessary to adjust the rotation directions, joint angle limits, and maximum joint rotation velocity and acceleration for each axis between ROS and the robot to ensure consistency.
The robot can be configured through the settings interface on the teach pendant.
In ROS, you can modify the parameters under the axis and limit tags for each joint angle in the xacro file to achieve consistency in the rotation directions and limits between the model and the robot. Modify the max_velocity and max_acceleration in the qj_config/config/joint_limits file to change the maximum joint rotation velocity and acceleration in the ROS model.
If the rotation directions, joint angle limits, and maximum joint rotation velocity and acceleration are not consistent, the teach pendant may report errors such as angle limit exceeded and servo alarm during operation
......
<joint
name="robot_joint2" <!--Joint name-->
type="revolute">
<origin
xyz="0 0.18 -0.0525"
rpy="0 0 0" />
<parent
link="robot_Link1" />
<child
link="robot_Link2" />
<axis
xyz="1 0 0" /> <!--Take 1 as the positive direction and -1 as the negative direction-->
<limit
lower="-3.14"
upper="3.14"
effort="100"
velocity="1" /> <!--lower is the lower limit of joint angle, upper is the upper limit. ROS uses radians, and the teach pendant uses degrees-->
<dynamics damping="0" friction="1"/>
</joint>
......joint_limits:
robot_joint1:
has_velocity_limits: true
max_velocity: 1
has_acceleration_limits: ture
max_acceleration: 1
<!--max_velocity: Maximum velocity of joint rotation, max_acceleration: Maximum acceleration of joint rotation, expressed in radians-->
......III. ROS Communication with Controller
Using a 6-axis robot as an example, let's explain how ROS can connect with the NRC robot controller
1. Start the controller
2. Launch the combined simulation environment of Rviz and Gazebo
roslaunch inexbot_qj robot_bringup.launch3. Add the robot model
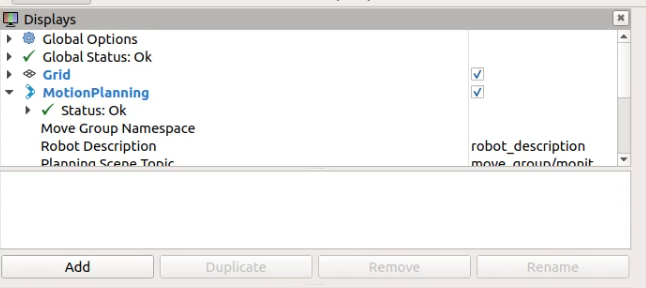
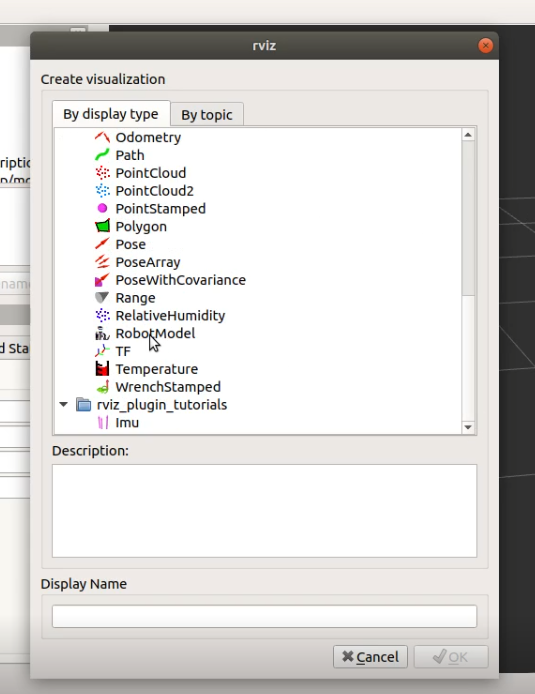
Click on "Add" in the bottom left corner of the "Displays" interface, then select "Robot Model" to add the robot model
4. Start the ros node to connect with the controller
rosrun inexbot_service rostopic_joint5Ⅳ. Controlling the Robot through MoveIt
1. Set Goal state control
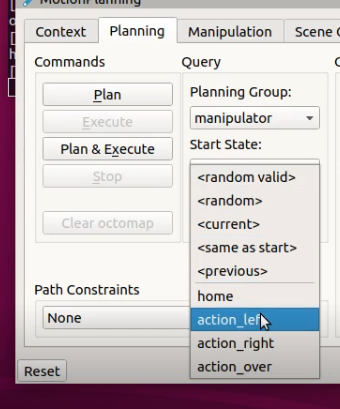
Click on "Plan" to generate a planned trajectory. The bottom will display the planned time (Time).
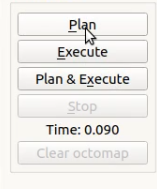
Click on "Execute" to execute the planned trajectory. Alternatively, you can click on "Plan&Execute" to plan and execute immediately
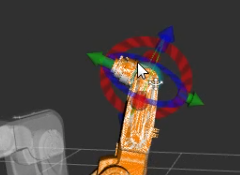
2. Control through dragging the planner
Drag the green ball on the front end of the planner. When the cursor is placed on the ball, a 3D coordinate will appear below. Drag it to the desired point, then click on "Plan" to generate a planned trajectory. Click on "Execute" to execute the trajectory. Alternatively, you can click on "Plan&Execute" to plan and execute immediately.
Ⅴ. Controlling the Robot through C++ Programming
1. Create a ROS package to store the program files
cd ~/inexbot/src
catkin_create_pkg inexbot_code std_msgs rospy roscpp
cd ../
catkin_make2. Joint space planning
Create moveit_joint_demo.c
Place the file in the~/inexbot/src/inexbot_code/src directory
//moveit_joint_demo.c
#include <ros/ros.h>
#include <moveit/move_group_interface/move_group_interface.h>
int main(int argc, char **argv)
{
//ros initialization
ros::init(argc, argv, "moveit_joint_demo");
ros::AsyncSpinner spinner(1);
spinner.start();
//manipulator is the planning group set up through moveit
moveit::planning_interface::MoveGroupInterface arm("manipulator");
//allowable error
arm.setGoalJointTolerance(0.001);
//maximum acceleration
arm.setMaxAccelerationScalingFactor(0.2);
//maximum velocity
arm.setMaxVelocityScalingFactor(0.2);
// Set the goal_state to control the robot arm to move back to the home position
// 'home' is a pre-defined position in moveit
arm.setNamedTarget("home");
//execute the motion
arm.move();
sleep(1);
//set the angles of the six axes in joint space
double targetPose[6] = {0.391410, -0.676384, -0.376217, 0.0, 1.052834, 0.454125};
std::vector<double> joint_group_positions(6);
joint_group_positions[0] = targetPose[0];
joint_group_positions[1] = targetPose[1];
joint_group_positions[2] = targetPose[2];
joint_group_positions[3] = targetPose[3];
joint_group_positions[4] = targetPose[4];
joint_group_positions[5] = targetPose[5];
arm.setJointValueTarget(joint_group_positions);
arm.move();
sleep(1);
// Control the robot arm to move back to the home position
arm.setNamedTarget("home");
arm.move();
sleep(1);
ros::shutdown();
return 0;
}Modify CMakeLists.txt file
Add the following lines above the install tag:
add_executable(moveit_joint_demo src/moveit_joint_demo.cpp)
target_link_libraries(moveit_joint_demo ${catkin_LIBRARIES})
#############
## Install ##
#############Compile the code
cd ~/inexbot
catkin_makeRun
rosrun inexbot_code moveit_joint_demo