
Calibration Series_6-Point Calibration
2022-05-23
Enter the "Settings - Tool hand calibration - 7-point calibration" interface, select 6-point calibration as the calibration method.
The calibration method is as follows:
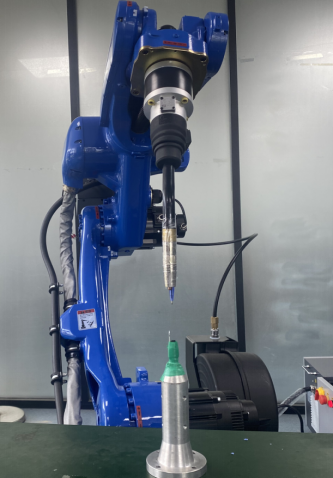
P1
Make the robot's axis 5 vertically downward

Preview
P2
The robot rotates 180° around the C-axis on the basis of the first point

Preview
P3
The robot rotates 35°around the B-axis

Preview
P4
The robot returns to zero point with the tool hand end vertical

Preview
P5
The robot performs X- movement on the basis of the fourth point
Preview
P6
The robot performs Y+ movement on the basis of the fifth point

Preview
Note
- After the 6-point calibration is completed, select any point that has been calibrated, click "Run to this point" to check if the calibration is accurate.
- Click the "Calculate" button to complete the calibration. Click the "Return" button at the bottom to return to the "Tool hand calibration" interface. Rotating around ABC can check if the calibrated points are correct.
- If you are not satisfied with a point that has been calibrated during the calibration process, you can click the "Cancel calibration" button corresponding to that line to cancel the calibration and then calibrate the point again.
- Click the "Return" button at the bottom to return to the "Tool hand calibration" interface.
If there are errors in this article please give us feedback, we value your comments or suggestions.