
Palletizing Industry Solution
Palletizing is the process of neatly stacking items together for easier transportation and installation, and it is applicable to various industries such as printing, frozen food, and food. With the continuous improvement of industrial level and the implementation of production processes on assembly lines, palletizing process has been widely used in production, improving the handling capacity of materials, significantly saving labor, and reducing operation time.
Different from the limitations of traditional palletizing process, the iNexBot control system's palletizing process is more open and flexible.
More Comprehensive Functions
- The iNexBot control system supports both simple palletizing and complete palletizing types. Simple palletizing: Only two steps are required, suitable for simple user requirements. Complete palletizing: More functions, suitable for complex environments.
- The palletizing process in the iNexBot control system has a special feature: drag-and-drop settings. Users can manually drag the workpieces on the screen to move their positions.
 PreviewDrag and drop to set palletizing type
PreviewDrag and drop to set palletizing type - Traditional palletizing supports only one type of gripper, and the number of the gripper is unique, but the palletizing process in the iNexBot control system supports four grippers. Users can switch between gripper types or use multiple grippers simultaneously, allowing more workpieces to be picked up, thus saving time and improving efficiency.
Easy
- The setting process of traditional palletizing process is complex, while the iNexBot control system's palletizing process setting adopts a flowchart format, making it clear and concise
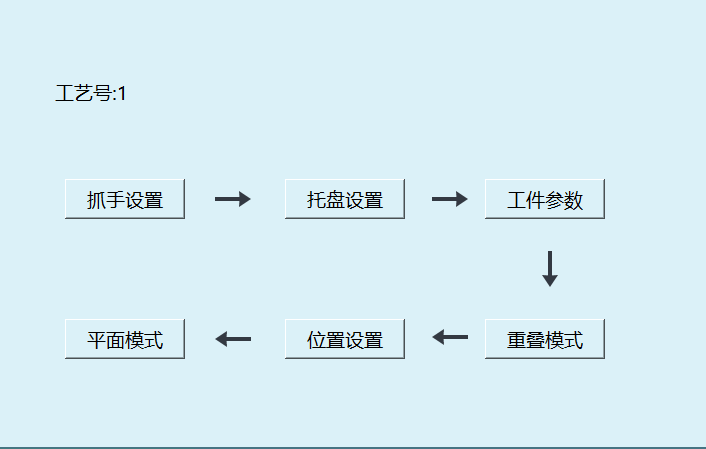 PreviewProcess setup
PreviewProcess setup - Traditional palletizing operations are complicated. Even for simple palletizing processes, users need to spend a lot of time programming the workflow. To address this pain point, the iNexBot control system has added a special feature: file generation. Users only need to make basic settings, and a job file with complete workflow for palletizing or depalletizing can be automatically generated
Flexible
- In traditional palletizing, once the program is compiled, users cannot view the specific positions of individual pallet stacks. To address this shortcoming, the iNexBot control system has added a special feature: position debugging. Users can view the specific positions of pallet stacks on this page and can select a stack to move the robot to that point
 PreviewVisual view of pallet type
PreviewVisual view of pallet type - The iNexBot control system has optimized the palletizing entry point. In the palletizing entry point instruction, it added optimization for the XYZ position of the entry point and the gripper attitude. The gripper attitude optimization provides two options: automatic attitude calculation and auxiliary point attitude synchronization, greatly saving unnecessary time
 PreviewOptimization
PreviewOptimization - The iNexBot control system supports the combination of conveyor belt, vision, and palletizing
 PreviewConveyor belt/vision/palletizing
PreviewConveyor belt/vision/palletizing
Faster Tempo, Smoother Actions, Higher Efficiency
When handling lighter and smaller objects, the tempo of the iNexBot control system is 700 packages/hour - 800 packages/hour. When handling heavier and larger objects such as fertilizer bags and feed bags, the tempo is 500 packages/hour - 550 packages/hour, which is much higher than traditional palletizing and is also at the forefront of the industry
Typical Cases
Customer site: One production line with two pallet stacks. Technical challenges: 1. The robot needs to interchangeably pick up and place items in the two pallet stacks. 2. The customer requires a specific pallet stack to be prioritized
Customer site: Two production lines with two pallet stacks. Technical challenges: 1. For the left production line, the robot needs to pick up items and place them in the left pallet stack, and for the right production line, it needs to place them in the right pallet stack. 2. When both production lines receive materials simultaneously, the robot will complete the previous pallet stack before moving on to the next one