
智能力控
智能力控包含了基于力矩的碰撞检测、拖拽示教、力矩前馈等带载动力学功能。
辨识
为了方便使用,纳博特控制系统中的动力学参数仅需通过辨识来自动生成。仅需通过自动运行预设轨迹系统便可得到机器人的动力学参数。
碰撞检测
随着工业机器人技术的发展,机器人所需要实现的功能越来越复杂,而在机器人运动的过程中,操作人员可能需要进入到机器人的工作区域,但是同时需要保证操作人员的安全,所以需要实时的检测到机器人与操作人员之间是否发生碰撞,保证了操作人员的人生安全。或者防止两台协作机器人在工作时要是发生了碰撞。碰撞检测功能可以适配任意六轴机器人。在无外置传感器的情况下即使带有负载也具有较高的灵敏度,极大降低生产事故发生率。
力矩前馈
完成动力学辨识后,打开力矩前馈功能的开关即可在运行作业程序时应用力矩前馈功能。
力矩前馈功能旨在机械臂进行实际运动前就可以已知机械臂的运动情况,并根据该运动情况对机械臂运动过程中可能产生的一些偏差进行调节优化,如在某些姿态下或加装负载后机械臂运动出现抖动。力矩前馈在机械臂进行运动前即已知各关节应该在怎样的力矩下进行运动,从而减弱了运动过程中的超调,在宏观表现上即为机械臂运动时的抖动被抑制。不止是抖动抑制,力矩前馈功能还可以提高机械臂的运行速度,降低位置跟随误差,增加机械臂运动的柔顺性。
在使用上,只需要填写负载的质量和偏置即可将带负载的动力学功能应用到实际生产中。并且在生产过程中,可以通过指令更新机械臂末端的负载情况,从而极大地提高了功能的灵活性。
把支持负载的动力学功能与力矩前馈功能结合到一起,可以有效地解决机械臂装上重量较大的负载时的抖动问题,并且可以提高机械臂的运动速度。
拖拽示教
纳博特控制系统的拖拽示教支持两种拖拽模式。分别是力矩拖拽和 3D 鼠标拖拽。
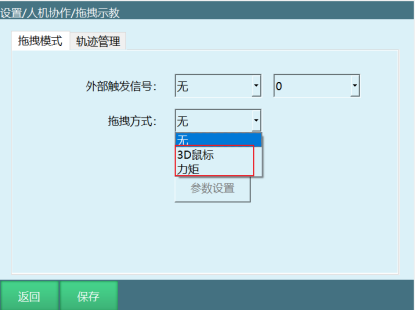
力矩拖拽
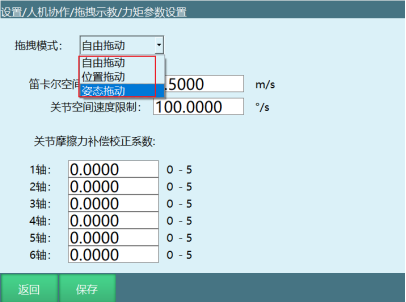
通过外力来拖拽机器人,拖拽的轨迹会记录下来与回放。力矩拖拽我们有三种拖拽模式(自由拖动,位置拖动,姿态拖动),拖拽时的每个轴是否顺滑可以通过设置关节摩擦系数,设置的摩擦系数不能太大,否则一上电机器人会往下掉,对于操作人员和机器人都会造成危险。
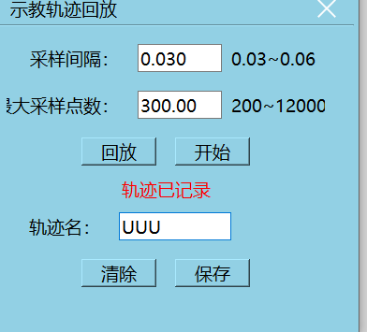
拖拽的轨迹会在人机协作-拖拽示教界面记录,拖拽的轨迹名会在轨迹管理界面记录下来,拖拽的轨迹会一直保存。记录的轨迹可以随时的回放。
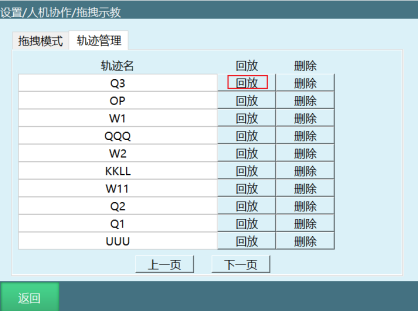
在监控-快捷键-轨迹回放界面我们也可以实现拖拽轨迹的记录,拖拽的轨迹会实时的保存在轨迹管理界面。
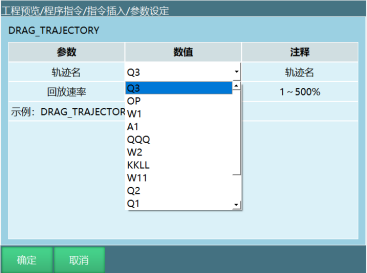
拖拽示教指令在运动控制类指令类型
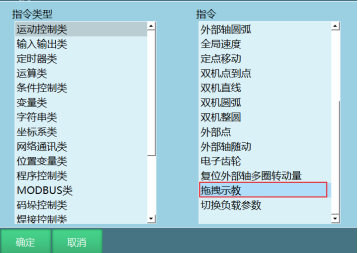
拖拽示教指令我们也支持轨迹的回放,并且可以随时修改你想要回放的轨迹名。
3D 鼠标拖拽
在一些人机交互的工作时,人需要拖动机器人走上一段直线距离,这时候力矩拖拽无法满足直线拖拽,我们的 3D 鼠标可以实现末端 XYZ 的拖动,姿态 ABC 轴的拖动,相对于力矩拖拽 3D 鼠标拖拽的精准度高。
自适应加减速度
使用方面辨识结束后打开使能开关,填写负载参数,机器人在运行的过程中会自动调节加减速度。


